Journée Technique ²RM : Véhicules Autonomes et Robotique Mobile Terrestre
Plan d’accès
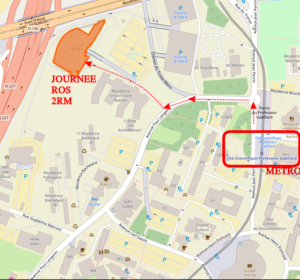
La journée se déroulera à l’UTC (Compiègne) au laboratoire Heudiasyc dans le bâtiment du centre d’innovation. Pour vous rendre sur le site un plan d’accès est accessible ci-après : plan_acces_UTC
A partir de la gare SNCF les bus dans Compiègne sont gratuits, si vous venez en véhicule, il faudra stationner votre voiture sur le parking visiteurs indiqué sur le plan (rue Pierre Grange), le centre d’innovation de l’UTC se trouve à une centaine de mètres à pied (rond-point Deniélou).
Description
En coordination avec le GT2 Véhicules Autonomes, axe Véhicules terrestres du GDR robotique, le réseau métier ²RM organise au laboratoire HEUDIASYC, sur le site de l’Université de Technologie de Compiègne, une journée technique sur le thème des véhicules autonomes.
La journée aura lieu le 10 septembre 2019 et s’articulera autour d’exposés techniques et de démonstrations de la plateforme Véhicules Intelligents et Autonomes d’HEUDIASYC.
Plusieurs thèmes seront abordés lors de cette journée :
- outils pour le développement d’applications de conduite ou de
navigation autonome
- retours d’expérience sur des cas d’expérimentations de véhicules
autonomes
- génération et exploitation de datasets
- algorithmes de perception ou de localisation pour le véhicule autonome
- utilisation de cartographie 2D / 3D
- capteurs pour les véhicules autonomes
- middleware, frameworks pour le véhicule autonome
- communication multi-robots, mutli-véhicules
- Interfaces Homme Machines pour les véhicules autonomes
- Présentation d’un démonstrateur
- Outils de simulation pour le véhicule autonome
Les exposés pourront porter sur des retours d’expérience sur tout type de robots mobiles terrestres dont des véhicules routiers de type automobile, des navettes, des robots mobiles à roues, des AGV, des robots agricoles, etc.
Un appel à participation pour les exposés et les démonstrations est lancé. Pour présenter vos travaux sur l’un de ces thèmes ou un sujet s’y rapprochant, vous pouvez contacter par email le comité de pilotage <mailto:2rm-copil@services.cnrs.fr> du réseau (2rm-copil@services.cnrs.fr).
L’inscription est gratuite mais obligatoire, les locaux étant sous régime ZRR. Un lien vers le site d’inscription est disponible ci-dessous.
Nous vous attendons nombreuses et nombreux !
Programme et Inscriptions
Programme :
- 8h30 : accueil au Centre d’Innovation de l’UTC, laboratoire Heudiasyc UMR 7253 UTC/CNRS
- 8h50 : ouverture de la journée
Session 1 : ROS pour les véhicules autonomes
- 9h : Huu-Phuc Nguyen, SIVALAB, “Implémentation de roscontrol sur la flotte de véhicules autonomes d’Heudiasyc”
- 9h30 : Laurent Malaterre, François Marmoiton, Institut Pascal, “Communication inter-véhicules à l’Institut Pascal et retours d’expériences IV’19”
- 10h : pause
Session 2 : Robotique mobile autonome, localisation, perception et navigation
- 10h30 : Nicolas Cuperlier, ETIS, “Modèles neuro-robotiques pour la navigation”
- 11h : Arjun Balakrishnan, SATIE, “An Integrity Assessment Framework for Multi-modal Vehicle Localization”
- 11h30 : Marie-Anne Mittet, Renault, “Travaux sur la localisation et la cartographie à l’aide de perception et de ROS”
Pause méridienne et Démos
- 12h : Repas
- 13h30 : Session Démos
- Démonstrateur Renault, Frederic PEYMIRAT, « Présentation prototype ZOE dédié à la Perception et la Localisation. »
- Démontrations embarquées à bord des véhicules autonomes du laboratoire Heudiasyc :
- Insertion collaborative en rond point
- Suivi de trajectoire via roscontrol
Session 3 : Approche par simulation
- 15h : Dominique Gruyer, Olivier Orfila, IFSTTAR LIVIC, “From virtual to reality, how to test and evaluate new ADAS function: application to autonomous connected and eco-responsable driving”
Session 4 : Datasets
- 15h30 : Rémi Defraiteur, SATIE, « Towards a Reference Data Generation Framework for Performance Assessment of Perception Systems »
- 16h : Corentin Sanchez, Guillaume Beduneau, SIVALAB, “Construction de jeux de données pour les véhicules autonomes”
- 16h30 : Michaël Mordefroy, SIVALAB, “Gestion des datasets”
- 17h : conclusions de la journée
Les présentations et ressources de la journée seront disponibles sur le wiki du réseau : https://wiki.2rm.cnrs.fr/
Site d’inscription :
L’inscription est gratuite mais obligatoire pour des raisons d’accès en zone sécurisée (ZRR), il vous suffit de compléter le formulaire suivant :
https://evento.renater.fr/survey/journee-technique-rm-51o4t5du
Comité d’organisation
- Stéphane Bonnet, Heudiasyc, GT9-²RM
- Gérald Dherbomez, CRIStAL, GT9-²RM
- Roland Lenain, IRSTEA, GT2